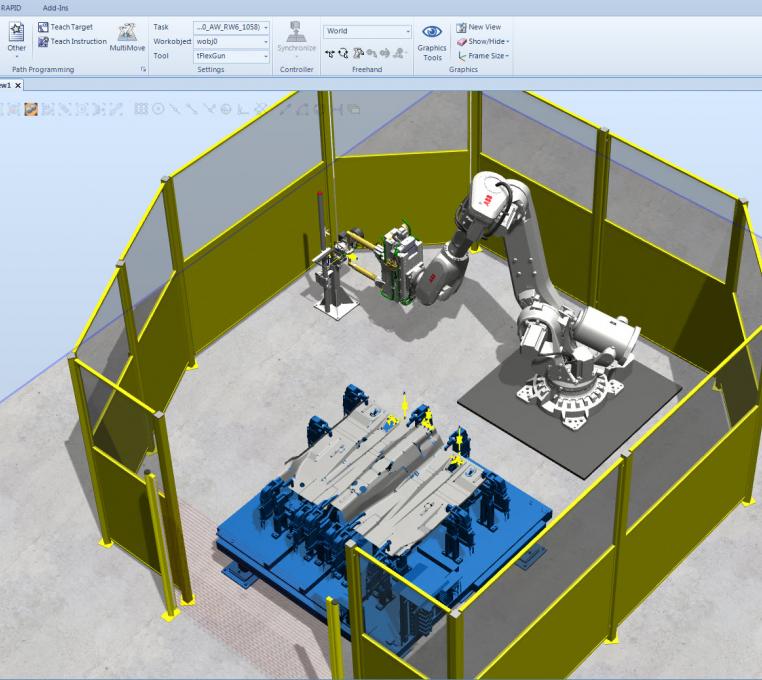
We create kinematic simulations and offline programmes for robot stations using relevant 3D software. We participate in projects from the station construction concept development phase all the way to the generation of robot programmes. We prepare virtual commissioning of industrial automation systems in terms of robotics, control and visualisation systems.
VIRTUAL COMMISSIONING / SIMULATION
During project development, we fuse the virtual worls with the physical one using the following software Process Simulate, Delmia V5 and Robcad. For this purpose we use RCS units for robots by diverse manufacturers, which offer high mapping precision of the created pathways and allow for early potimisation.
We have experience in dealing with diverse simulation and programming standards. During the further stages of work, we deal with the development of preliminary station concepts, the choice of tools, process verification, development and optimisation of robot movements and the preparation of final programmes according to customer requirements. During all stages, we cooperate closely with the construction departments, to eliminate as many errors at possible early on during the design stage.
We deal with virtual commissioning, in order to facilitate and reduce the work time related to the on-site implementation. For the purpose of visualisation of production line operation, we use SGView as well as RF::YAMS. We work in WinMOD and RF::ViPer. We are currently intensely working on the ability to use WinMOD to simulate continuous objects.
